Causal Robotics DEbugging (CaRE)
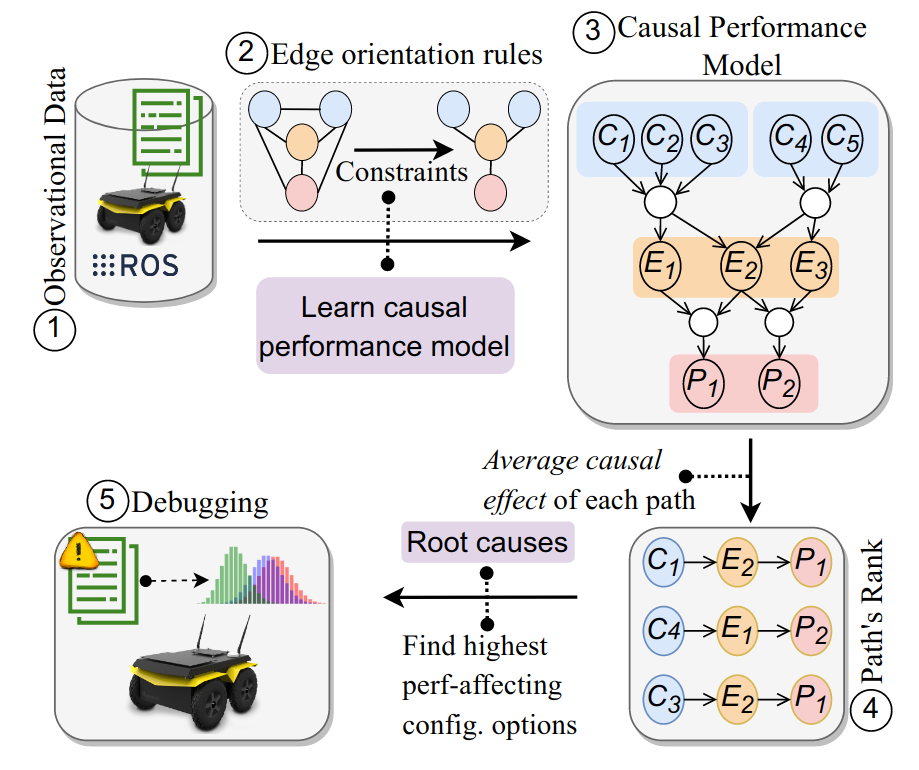
Diagnosing the root causes using CaRE
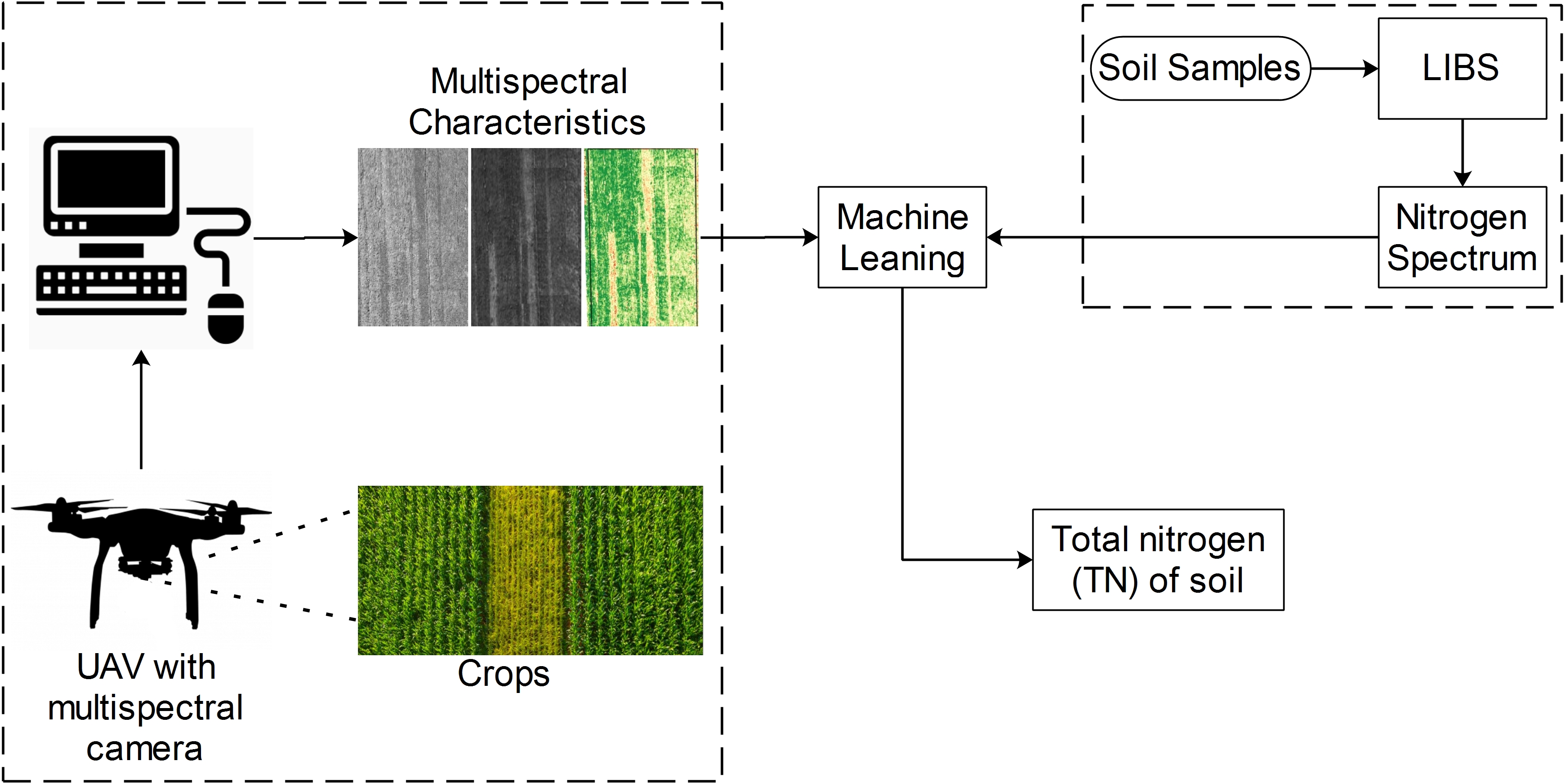
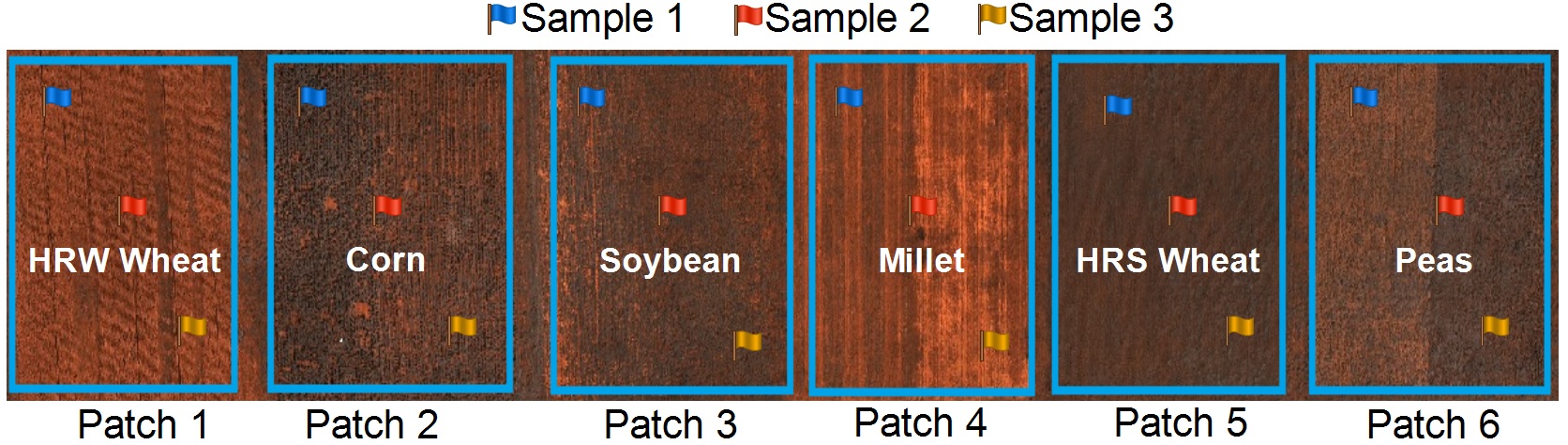
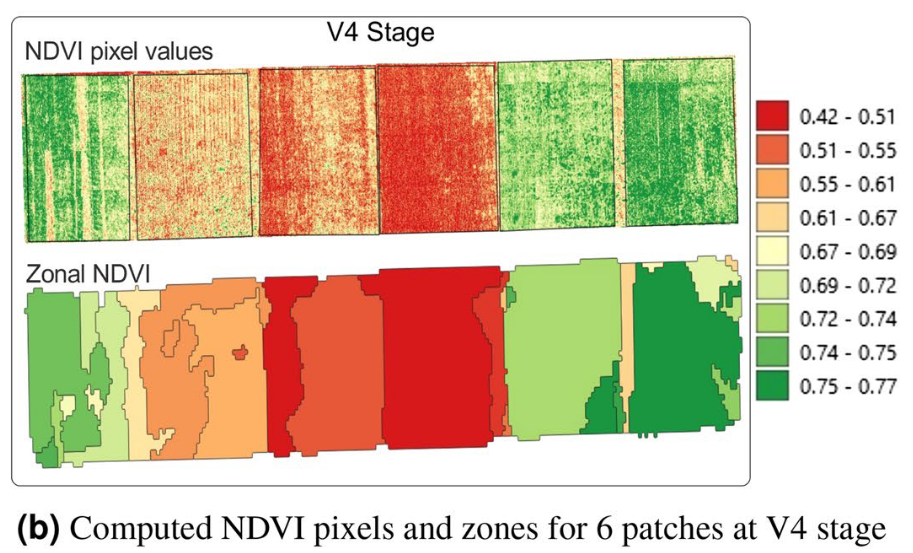
UAV-base Multispectral Sensing Solution (UMS)
Automated Medical Assistant (AMA)

ASA piloting test at BSMMU
Eye-Arm Interaction


ARC-71

ARC-71 rover at Mars research desert station, Hanksville, Utah.
