2023
Md Hafizur Rahman, Md Ali Azam, Md Abir Hossen, Shankarachary Ragi, and Venkataramana Gadhamshetty
Arxiv
Abstract
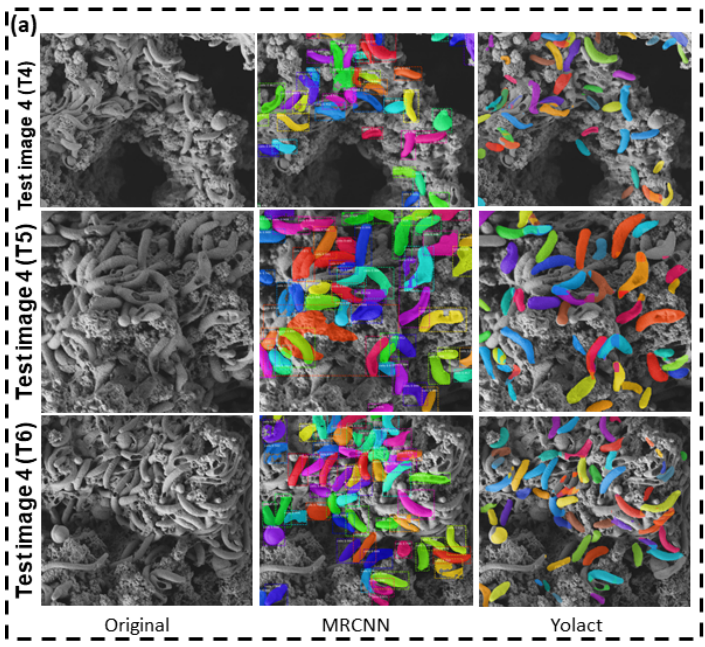
Desulfovibrio alaskensis G20 (DA-G20) is utilized as a model for sulfate-reducing bacteria (SRB) that are associated with corrosion issues caused by microorganisms. SRB-based biofilms are thought to be responsible for the billion-dollar-per-year bio-corrosion of metal infrastructure. Understanding the extraction of the bacterial cells' shape and size properties in the SRB-biofilm at different growth stages will assist with the design of anti-corrosion techniques. However, numerous issues affect current approaches, including time-consuming geometric property extraction, low efficiency, and high error rates. This paper proposes BiofilScanner, a Yolact-based deep learning method integrated with invariant moments to address these problems. Our approach efficiently detects and segments bacterial cells in an SRB image while simultaneously invariant moments measure the geometric characteristics of the segmented cells with low errors. The numerical experiments of the proposed method demonstrate that the BiofilmScanner is 2.1x and 6.8x faster than our earlier Mask-RCNN and DLv3+ methods for detecting, segmenting, and measuring the geometric properties of the cell. Furthermore, the BiofilmScanner achieved an F1-score of 85.28% while Mask-RCNN and DLv3+ obtained F1-scores of 77.67% and 75.18%, respectively.
★ CaRE: Finding Root Causes of Configuration Issues in Highly-Configurable Robots
Md Abir Hossen, Sonam Kharade, Bradley Schmerl, Javier Cámara, Jason M. O'Kane, Ellen C. Czaplinski, Katherine A. Dzurilla, David Garlan, and Pooyan Jamshidi
Arxiv
Abstract
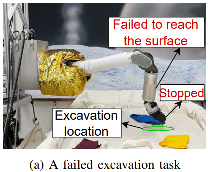
Robotic systems have several subsystems that possess a huge combinatorial configuration space and hundreds or even thousands of possible software and hardware configuration options interacting non-trivially. The configurable parameters can be tailored to target specific objectives, but when incorrectly configured, can cause functional faults. Finding the root cause of such faults is challenging due to the exponentially large configuration space and the dependencies between the robot's configuration settings and performance. This paper proposes CaRE, a method for diagnosing the root cause of functional faults through the lens of causality, which abstracts the causal relationships between various configuration options and the robot's performance objectives. We demonstrate CaRE's efficacy by finding the root cause of the observed functional faults via CaRE and validating the diagnosed root cause, conducting experiments in both physical robots (Husky and Turtlebot 3) and in simulation (Gazebo). Furthermore, we demonstrate that the causal models learned from robots in simulation (simulating Husky in Gazebo) are transferable to physical robots across different platforms (Turtlebot 3).
2022
★ FELARE: Fair Scheduling of Machine Learning Tasks on Heterogeneous Edge Systems
Ali Mokhtari, Md Abir Hossen, Pooyan Jamshidi, Mohsen Amini Salehi
IEEE 15th International Conference on Cloud Computing (CLOUD), pp. 459-468 (2022)
Abstract
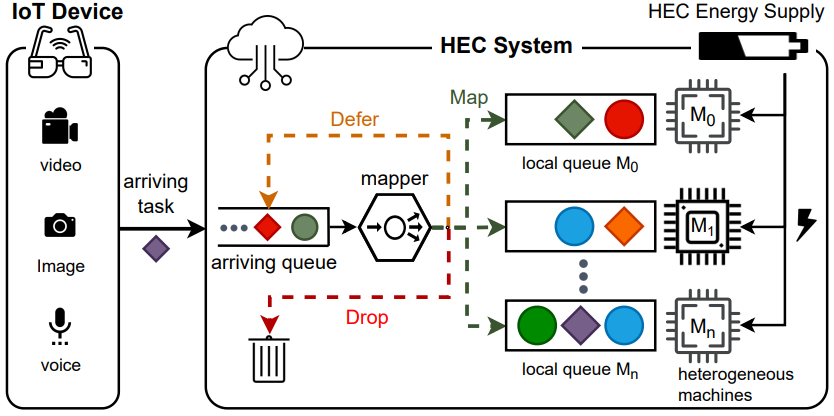
Edge computing enables smart IoT-based systems via concurrent and continuous execution of latency-sensitive machine learning (ML) applications. These edge-based machine learning systems are often battery-powered (i.e., energy-limited). They use heterogeneous resources with diverse computing performance (e.g., CPU, GPU, and/or FPGA) to fulfill the latency constraints of ML applications. The challenge is to allocate user requests for different ML applications on the Heterogeneous Edge Computing Systems (HEC) with respect to both the energy and latency constraints of these systems. To this end, we study and analyze resource allocation solutions that can increase the on-time task completion rate while considering the energy constraint. Importantly, we investigate edge-friendly (lightweight) multi-objective mapping heuristics that do not become biased toward a particular application type to achieve the objectives; instead, the heuristics consider "fairness" across the concurrent ML applications in their mapping decisions. Performance evaluations demonstrate that the proposed heuristic outperforms widely-used heuristics in heterogeneous systems in terms of the latency and energy objectives, particularly, at low to moderate request arrival rates. We observed 8.9% improvement in on-time task completion rate and 12.6% in energy-saving without imposing any significant overhead on the edge system.
Anjir Ahmed Chowdhury, Md Abir Hossen, Md Ali Azam, Md Hafizur Rahman
IEEE Access, vol. 10, pp. 6407-6416 (2022)
Abstract
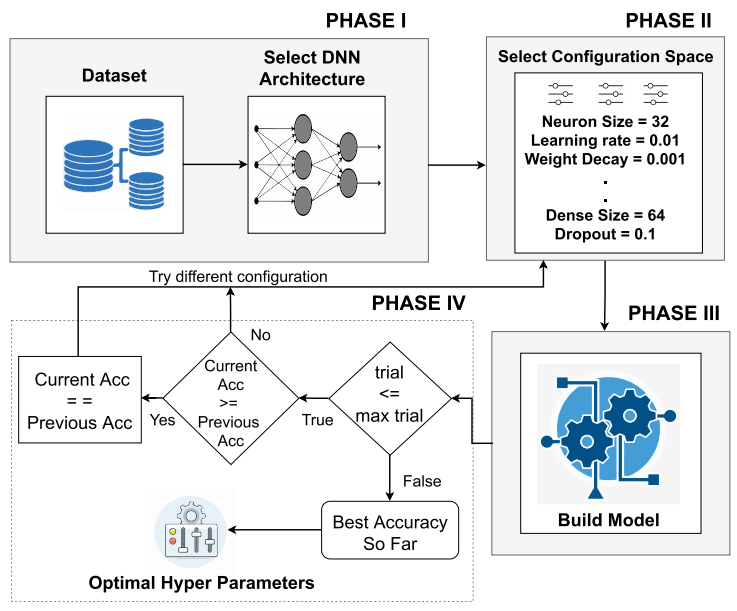
On-the-fly learning is unavoidable for applications that demand instantaneous deep neural network (DNN) training or where transferring data to the central system for training is costly. Hyperparameter optimization plays a significant role in the performance and reliability in deep learning. Many hyperparameter optimization algorithms have been developed for obtaining better validation accuracy in DNNs. Most state-of-the-art hyperparameter optimization techniques are computationally expensive due to the focus on validation accuracy. Therefore, they are unsuitable for on-the-fly learning applications that require faster computation on resource constraint devices (e.g., edge devices). In this paper, we develop a novel greedy approach-based hyperparameter optimization (GHO) algorithm enabling faster computing on edge devices for on-the-fly learning applications. In GHO, we obtain the validation accuracy locally for each of the hyperparameter configurations. The GHO algorithm optimizes each hyperparameter while keeping the others constant in order to converge to the locally optimal solution in the expectation that this choice will lead to a globally optimal solution. We perform an empirical study to compute the performance such as computation time and energy consumption of the GHO and compare it with two state-of-the-art hyperparameter optimization algorithms. We also deploy the GHO algorithm in an edge device to validate the performance of our algorithm. We perform post-training quantization on the GHO algorithm to reduce the inference time. Our GHO algorithm is more than 3× energy efficient and 2× faster than two state-of-the-art hyperparameter optimization techniques on both DNNs and datasets studied in this paper.
2021
★ Total nitrogen estimation in agricultural soils via aerial multispectral imaging and LIBS
Md Abir Hossen, Prasoon K Diwakar, Shankarachary Ragi
Scientific Report 11, 12693 (2021)
Abstract
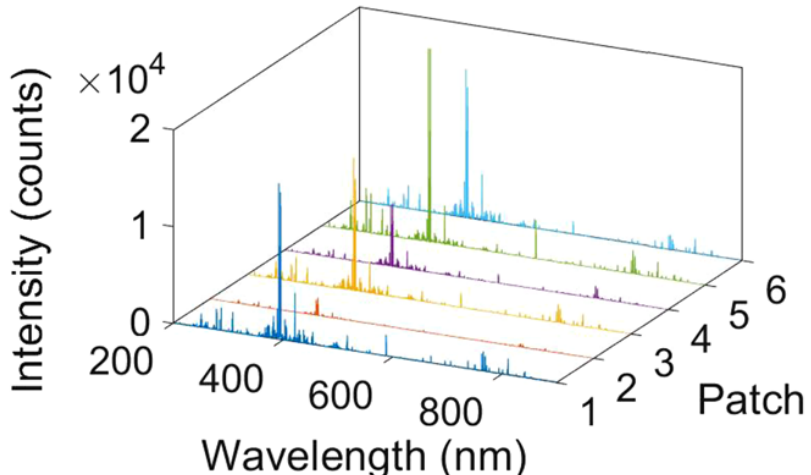
Measuring soil health indicators (SHIs), particularly soil total nitrogen (TN), is an important and challenging task that affects farmers’ decisions on timing, placement, and quantity of fertilizers applied in the farms. Most existing methods to measure SHIs are in-lab wet chemistry or spectroscopy-based methods, which require significant human input and effort, time-consuming, costly, and are low-throughput in nature. To address this challenge, we develop an artificial intelligence (AI)-driven near real-time unmanned aerial vehicle (UAV)-based multispectral sensing solution (UMS) to estimate soil TN in an agricultural farm. TN is an important macro-nutrient or SHI that directly affects the crop health. Accurate prediction of soil TN can significantly increase crop yield through informed decision making on the timing of seed planting, and fertilizer quantity and timing. The ground-truth data required to train the AI approaches is generated via laser-induced breakdown spectroscopy (LIBS), which can be readily used to characterize soil samples, providing rapid chemical analysis of the samples and their constituents (e.g., nitrogen, potassium, phosphorus, calcium). Although LIBS was previously applied for soil nutrient detection, there is no existing study on the integration of LIBS with UAV multispectral imaging and AI. We train two machine learning (ML) models including multi-layer perceptron regression and support vector regression to predict the soil nitrogen using a suite of data classes including multispectral characteristics of the soil and crops in red (R), near-infrared, and green (G) spectral bands, computed vegetation indices (NDVI), and environmental variables including air temperature and relative humidity (RH). To generate the ground-truth data or the training data for the machine learning models, we determine the N spectrum of the soil samples (collected from a farm) using LIBS and develop a calibration model using the correlation between actual TN of the soil samples and the maximum intensity of N spectrum. In addition, we extract the features from the multispectral images captured while the UAV follows an autonomous flight plan, at different growth stages of the crops. The ML model’s performance is tested on a fixed configuration space for the hyper-parameters using various hyper-parameter optimization techniques at three different wavelengths of the N spectrum.

Developing a Mobile Automated Medical Assistant for Hospitals in Bangladesh
Md Abir Hossen, Ebad Zahir, HM Ata-E-Rabbi, Md Ali Azam, Md Hafizur Rahman
IEEE World AI IoT Congress (AIIoT), Seattle, WA, USA
Abstract
This paper introduces a mobile robot that is designed to assist medical professionals in hospitals with daily simple tasks which allow the staff in turn to optimize their resources. A prototype of this robot was deployed at the Bangabandhu Sheikh Mujib Medical University in Bangladesh with funding from the Government of Bangladesh, USAID and UNDP. This robot performed its functions as an Automated Medical Assistant (AMA) by delivering to and interacting with patients and medical staff during its trial phase in 2018. This paper presents the robot to have an intuitive user interface, a user-friendly mode of communication, smart features in its command-and-control system, security, and energy optimization. The smart robot is able to navigate its way to specific patients as well as avoid obstacles and finally navigate back to its charging station once its energy is depleted.
Hybrid Ant Based Clustering for Data Clustering
Md Ali Azam, Md Abir Hossen, Md Hafizur Rahman
IEEE World AI IoT Congress (AIIoT), Seattle, WA, USA
Abstract
Biologically inspired computing techniques are very effective and useful in many areas of research including data clustering. Ant clustering algorithm is a nature-inspired clustering technique which is extensively studied for over two decades. In this study, we extend the ant clustering algorithm (ACA) to a hybrid ant clustering algorithm (hACA). Specifically, we include a genetic algorithm in standard ACA to extend the hybrid algorithm for better performance. We also introduced novel pick up and drop off rules to speed up the clustering performance. We study the performance of the hACA algorithm and compare with standard ACA as a benchmark.
2017

Ebad Zahir, Md Abir Hossen, Md Abdullah Al Mamun, Yousuf Md Amin, SM Ishfaq
International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox's Bazar, Bangladesh.
Abstract
This paper is presenting the findings of a student project that involved using an emerging technology of eye tracking to help handicapped people with mobility options. The designers' intention was to implement a prototype and test its feasibility for helping the poor and physically challenged people in Bangladesh. The working prototype has been designed with two versions. The first one is able to interface the video based eye tracking technology with a laptop so that the bedridden patient is able to control electrical appliances such as a robotic arm. The second version is tested for controlling the same robotic arm but with a standalone head unit with the intention to give the user a greater degree of freedom in mobility. Both versions are developed with the intention to help people with disabilities and improve their quality of life.
2016

Ebad Zahir, Md Mahfuzur Rahman, Md Abir Hossen, Ashik Sarker, HM Ata-E-Rabbi, Zishan Ahmed Onik, Chowdhury Miftah Mahmood Sagir, Shabab Iqbal, Sashanka Kumar Pramanik, Md Mezanur Rahman, Sefat Noor Orni, Md Josim Uddin, Md Kamrul Hassan, Nihar Sarker, Md Shohanuzzaman Zim, MD Nazimuddowla, Farhan Mamun, Minar Mahmud
IEEE/SICE International Symposium on System Integration (SII), Sapporo, Japan.
Abstract
Since the success of the Mars Pathfinder, a new chapter of space exploration began focusing on reducing the complexity of the rover and making it more autonomous, multifunctional, lightweight even at extreme adversities. A student based design for a competition allowed the researchers in this paper to explore a design that would meet those requirements. This paper presents the design of a six wheeled, triangular shaped chassis, having multi suspension based rover. This rover is integrated with a 2.4GHz communication system that not only allows the rover to be operated from a distance of 1km, but also allows the researchers to collect soil samples and test them on board the rover using a Microlab box. The rover also shows superior maneuverability by being able to turn 360° on the spot and able to scale obstacles of almost 1 feet. The performance of the design was also tested at a global competition — University Rover Challenge 2016 organized by The Mars Society held at Utah, USA, where this design came in 8th for the Phobos category. This competition only invited 30 rovers out of the 63 that applied from 12 different countries.