Variable Friction Device for Structural Control
Banded Rotary Friction Device (BRFD)
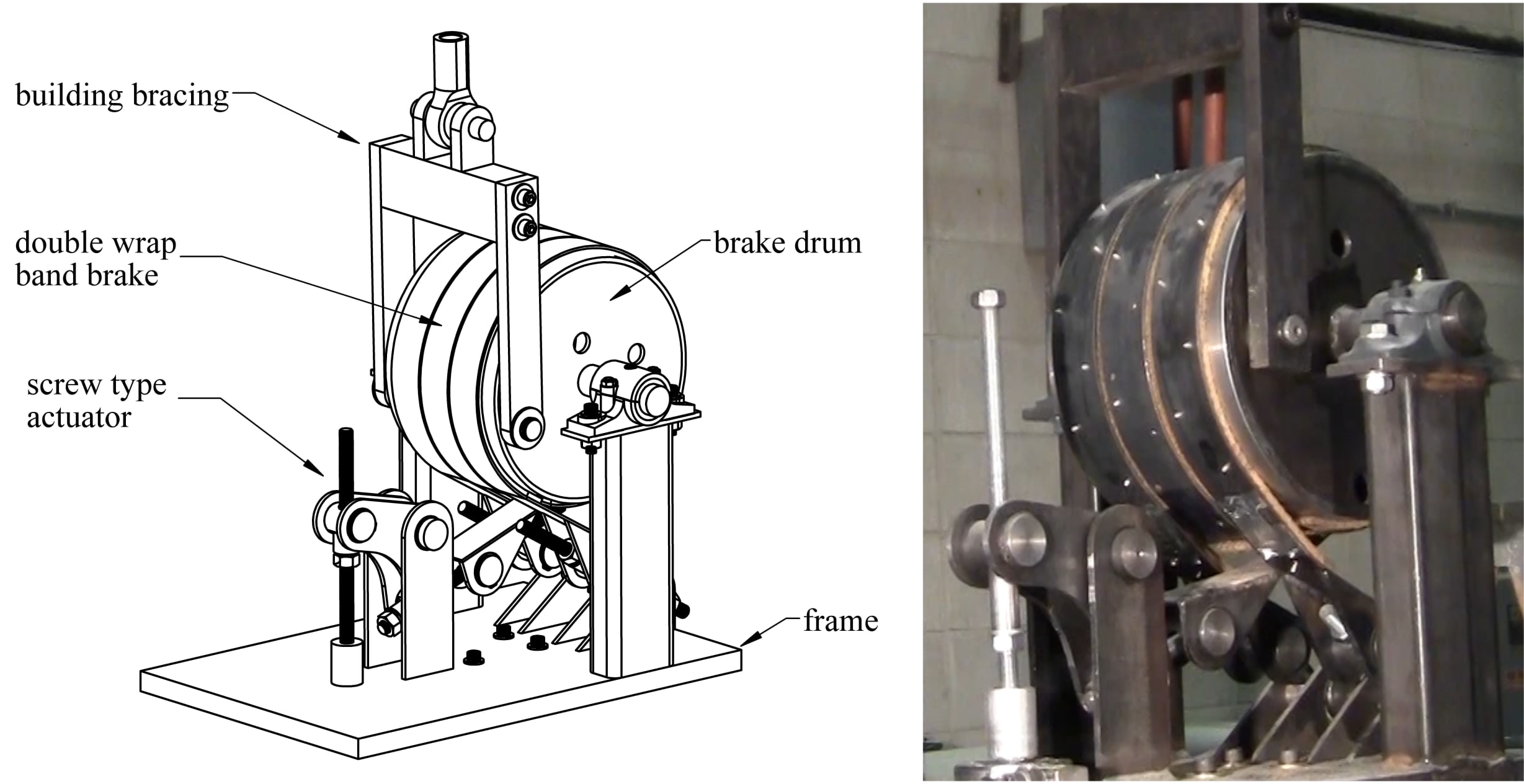
The ARTS-Lab is concurrently working on the development of high-performance control systems (HPCS) for enhanced mitigation performance for the next generation of structural systems. Such devices are ideal for mitigation of multiple hazards. High-performance control systems offer adaptability to a variety of loads, such as seismic, wind, and blast events.The Banded Rotary Friction Device (BRFD) is a variable friction devices capable of high energy dissipation, independent of velocity, through the dissipation of mechanical energy into heat. The friction force that is controlled by an actuator with a varying normal force. A prototype of the device is shown below. Laboratory verification of the prototype shown demonstrated a variable damping force with a maximum damping force capacity of 45 kN with an actuation force of a 0.267 kN, demonstrating a mechanical advantage of 169.
Selected Publications
Austin Downey, Liang Cao, Simon Laflamme, Douglas Taylor and James Ricles, "High capacity variable friction damper based on band brake technology." Engineering Structures, vol. 113, 2016, p. 287-298. doi:10.1016/j.engstruct.2016.01.035 PDF link BibTeX
Cam-based Passive Variable Friction Device
The Cam-based Passive Variable Friction Device provides a solution to increasing the resiliency of civil structures with respect to natural and man-made hazards using a passive friction damper where the hysteresis loop can be tuned to a specific hazard. This device uses a 3D printed cam with a predefined surface profile to vary the normal forces applied to a traditional sliding plate friction system. It follows that these varying forces develop a variable damping force that is dependent on the device’s displacement.
Selected Publications
Austin Downey, Connor Theisen, Heather Murphy, Nicholas Anastasi, and Simon Laflamme, "Cam-based Passive Variable Friction Device for Structural Control." Engineering Structures, vol. 188, 2019, p. 430-439, doi:10.1016/j.engstruct.2019.03.032. PDF link BibTeX
Austin Downey, MohammadKazem Sadoughi, Liang Cao, Simon Laflamme, and Chao Hu, "Passive Variable Friction Damper for Increased Structural Resilience to Multi-Hazard Excitations." Proceedings of the ASME 2018 International Design Engineering Technical Conferences, 2018, doi:10.1115/detc2018-85207
PDF
link
BibTeX