Jason M. O'Kane
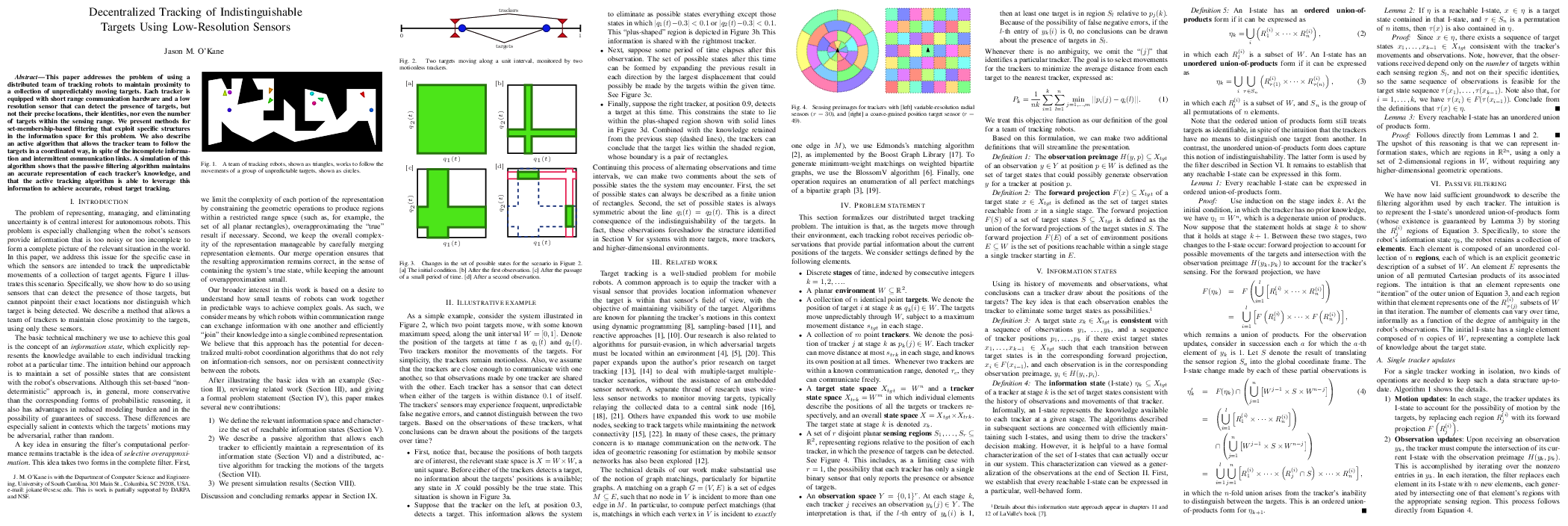
Jason M. O'KaneAbstract This paper addresses the problem of using a distributed team of tracking robots to maintain proximity to a collection of unpredictably moving targets. Each tracker is equipped with short range communication hardware and a low resolution sensor that can detect the presence of targets, but not their precise locations, their identities, nor even the number of targets within the sensing range. We present methods for set-membership-based filtering that exploit specific structures in the information space for this problem. We also describe an active algorithm that allows the tracker team to follow the targets in a coordinated way, in spite of the incomplete information and intermittent communication links. A simulation of this algorithm shows that the passive filtering algorithm maintains an accurate representation of each tracker's knowledge, and that the active tracking algorithm is able to leverage this information to achieve accurate, robust target tracking.
@inproceedings{OKa11,
author = {Jason M. O'Kane},
booktitle = {Proc. IEEE International Conference on Robotics and
Automation},
title = {Decentralized tracking of indistinguishable targets using
low-resolution sensors},
year = {2011}
}