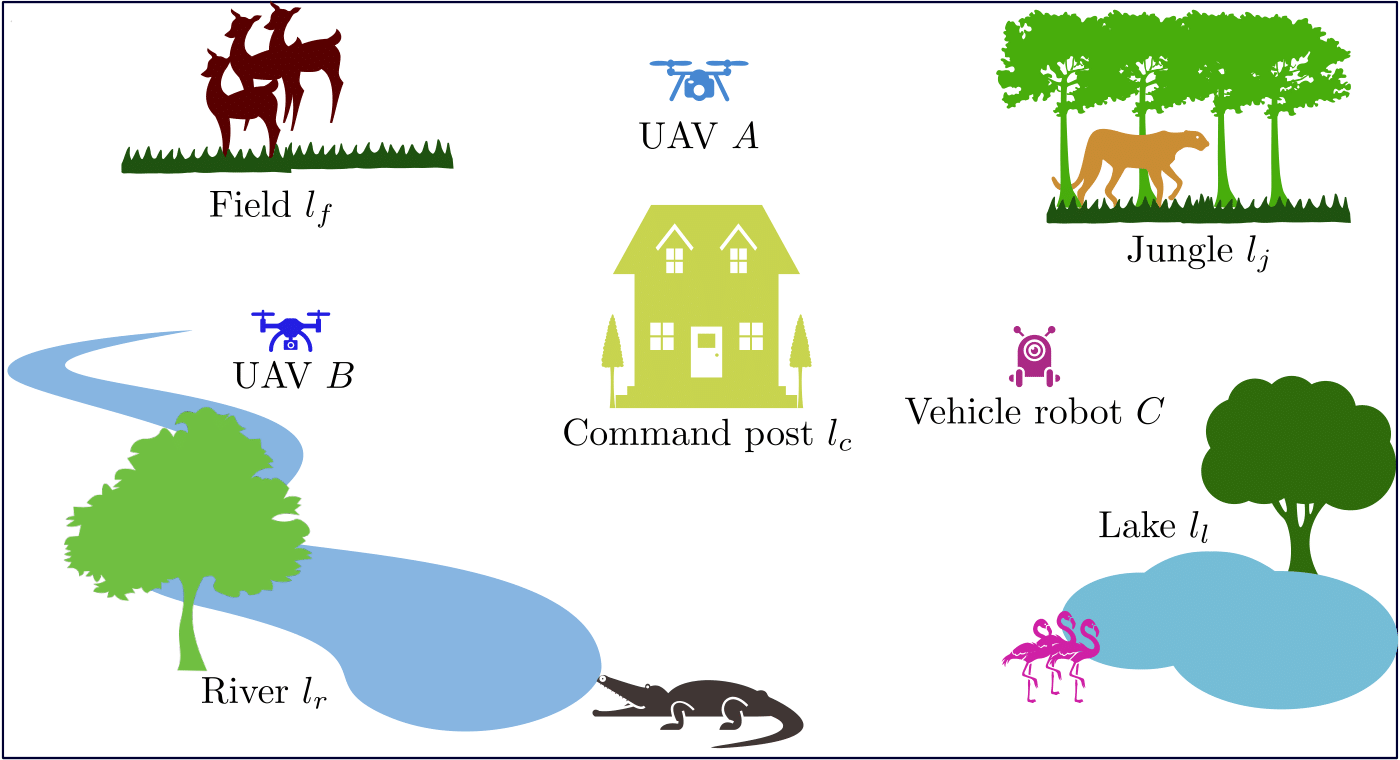
An overall view of a wildlife reserve, with 5 main regions, a grass field, a jungle, a command post, a riverside, and a lakeside. Notable fauna includes a cheetah, a crocodile, a herd of gazelles, and a flamboyance of flamingos; the latter two, being gregarious, remain as a group. Three robots, two drones and a ground vehicle, are tasked to cooperatively make a documentary from the events happen at the wildlife reserve. At each hour the animals move between the mentioned regions. The events of interest are gazelle grazing, cheetah eating gazelle, crocodile eating gazelle, flamingos mating, and crocodile eating flamingo. The robots does not know where the animal will go in the next hour, and thus, they should decide where to go for the next hour and which events try to capture to make a documentary whose sequence of events is specified by the user such that the expected time to make the documentary is minimized.